 |
产品型号:robocup标准版
产品代码:
产品价格:150000
折 扣 率: 0
最后更新:2016-08-05
关 注 度:2418
生产企业:杭州翊思机器人有限公司
|
|
|
 与企业联系时请告知该信息来自教育装备网! 与企业联系时请告知该信息来自教育装备网! |
|
|
产品详细介绍
小型组轮式机器人足球比赛是RoboCup机器人足球世界杯赛的主要项目之一,同时也是机器人技术和人工智能理论的良好的实验平台。
美国Cornell大学是小型组足球机器人研究的先驱者,先后研制成功了三代机器人竞赛和实验平台。第一代产品使用完全性约束的三轮全方位驱动的行走机构,并设计了相应的控制算法,为三轮全方位驱动机器人的理论研究和实用化奠定了基础;第二代平台则开始使用较为原始的四轮全方位运动机构,具有更大的运动速度和加速度,并在机器人的底层控制算法和决策系统的架构上进行了较为深入的研究;第三代机器人平台进行了分布式决策的尝试,计算机把摄像头采集到的场上信息经过简单处理后发给机器人,这种模式向分布式多智能体方向迈进了一步,由于这种创新设计不够健壮,最终在比赛和实际应用中没有发挥出预期的效果。
美国卡内基梅隆大学也在小型组足球机器人领域进行了较多的研究,卡内基梅隆大CMDragons平台在Corenll大学研究成果的基础上设计了较为完善的决策系统,优化了决策系统的整体架构以及机器人策略、角色分配、路径规划和底层控制的算法。同时在机器视觉的改进上进行了大量的探索,较好地满足了机器人足球比赛对视觉定位系统的要求。然而,CMU较为陈旧的机械结构等因素限制了该机器人平台性能的发挥。
泰国农业大学是小型组机器人领域的后起之秀,泰国农业大学的Skuba机器人平台使用简单而又结构化的机械机构搭建了机器人机身,并凭借精准的底层控制和巧妙的战术配合在竞赛中有较好的表现,Skuba平台继承和发展了卡内基梅隆大学的视觉系统,在定位精度和响应时间上都有了较大的提高。
翊思机器人生产的小型足球机器人系统进一步增加了前脸点阵、灯箱色标、蓝牙音箱系统,可作为小型组足球机器人竞赛的标准平台推广应用,也可以作为功能完备的竞赛系统直接参加机器人足球比赛,还可在此基础上开展机器人技术实验研究,为机器人技术新算法、新模型提供创新实验平台。
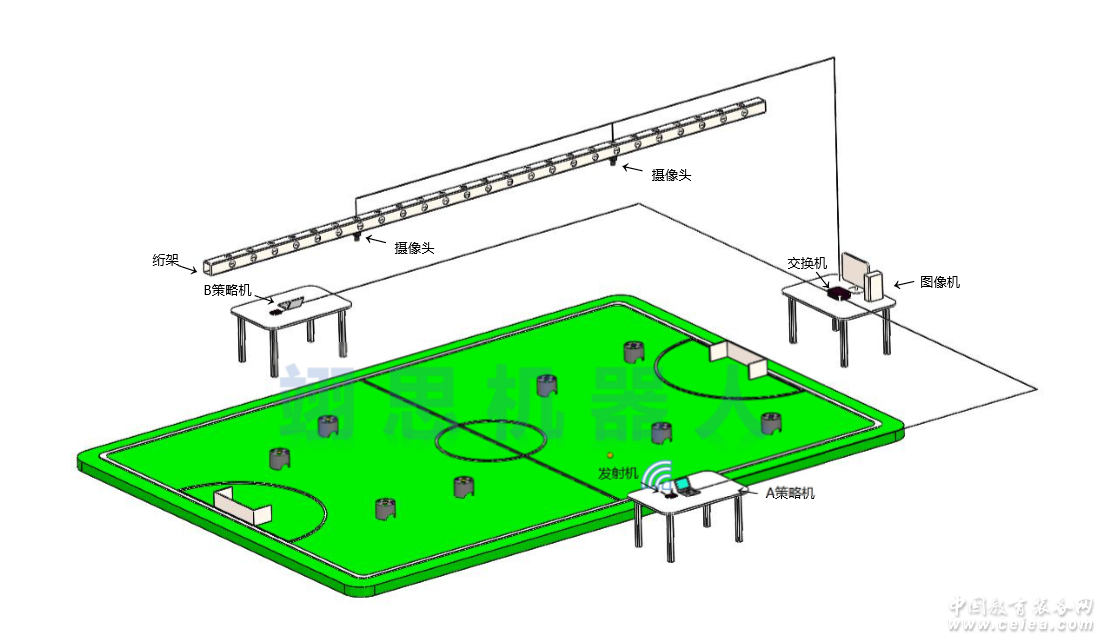
该系统平台从机器人足球比赛和实验研究的实际需求出发,制作了四轮蝶形分布的机器人运动构,实现了机器人的多自由度全向移动,并设计了控球、击球等机械机构;针对运动机构的特点研究了机器人的运动控制算法,设计了以ARM和FPGA为核心的机器人的底层控制系统,构建了稳定可靠的机器人子系统;基于畸变校正、目标分割、图像识别等图像处理方法开发了适合于实验室场地的机器视觉系统;编写了机器人自主决策系统,对机器人行为进行预测判断、提供决策库支持、实现动态环境下的全局路径规划;设计了2.4G射频通信模块,构建该平台的无线通信系统,实现机器人子系统与上层决策控制系统之间的信息交换;此外,本系统平台还使用“平台/插件”软件体系构建了RoboCup小型组足球机器人的开放式仿真系统。 |
|
| 会员级别:免费会员 |
| 加入时间:2016-08-05
|
|

|